激光测距、激光雷达原理、点云图、三维成像
GCS- LIDAR 激光雷达参数测量及应用实验
激光雷达LiDAR(Light Detection and Ranging)是激光探测及测距系统的简称。激光雷达是一种可以精确、快速获取地面或大气三维空间信息的主动探测技术,应用范围和发展前景十分广阔。
激光雷达是将激光技术、高速信息处理技术、计算机技术等高新技术相结合的产物。激光雷达将传统雷达技术与现代激光技术结合在一起,其工作原理与普通雷达相似;激光雷达是以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路等物体上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算得到从激光雷达到目标点的距离;脉冲激光不间断地实时扫描目标物,就可以获取目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体点云图像。
 |
激光雷达参数测量和应用实物图
♦ 知识点
激光测距、激光雷达原理、点云图、三维成像
♦ 涉及课程
激光原理、工程光学、光电检测、电子信息
♦ 实验内容
• 了解激光脉冲测距的基本原理
• 根据脉冲激光测量目标位置距离
• 了解激光雷达的主要结构及工作原理
• 不同反射率对激光雷达测量精度的影响
• 测量多线雷达垂直和水平角分辨率
• 用激光雷达测量目标物距离
• 多线雷达扫描3D图像
♦ 实验原理
激光脉冲式测距方案的是通过发射脉冲信号来探测待测目标的距离。激光发射击中障碍物后被反射回来并被激光接收系统接收和处理,激光发射和反射回来之间的时间,即飞行激光的时间。根据飞行时间,可以计算障碍物的距离。脉冲激光测距时激光发射的脉冲较窄,一般小于50ns。另外激光的功率会影响测量距离,如想测量公里级别较远距离的目标,激光平均输出功率往往需要瓦级别。
激光雷达在脉冲激光测距基础上,同时发射多条光束照射目标物,同时360度不断地扫描,这样可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体点云图像。
♦ 实验结果
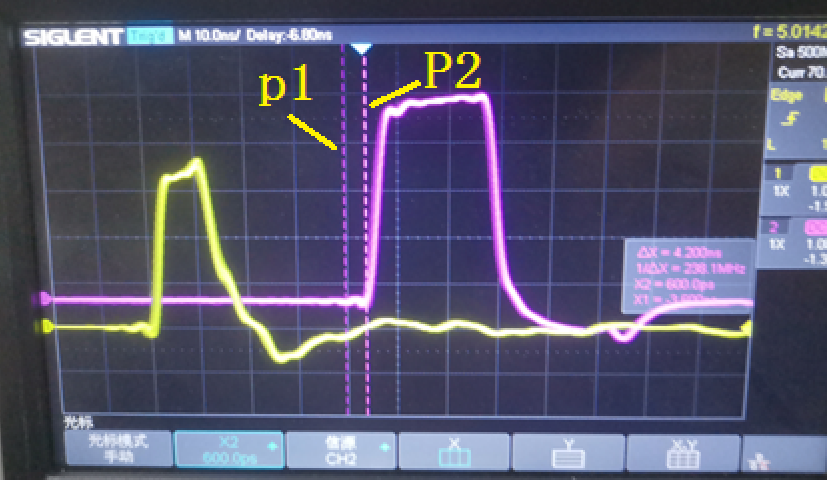 |
| 单点脉冲测距示意图 |
 |
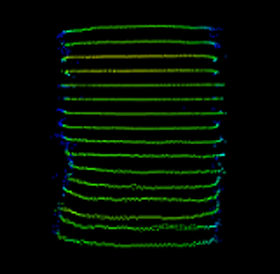 |
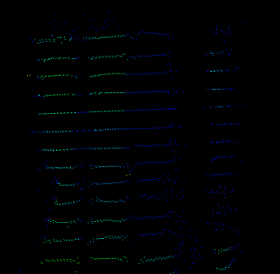
| 不同反射率(左)和相同反射率(右)样品扫描图 | |
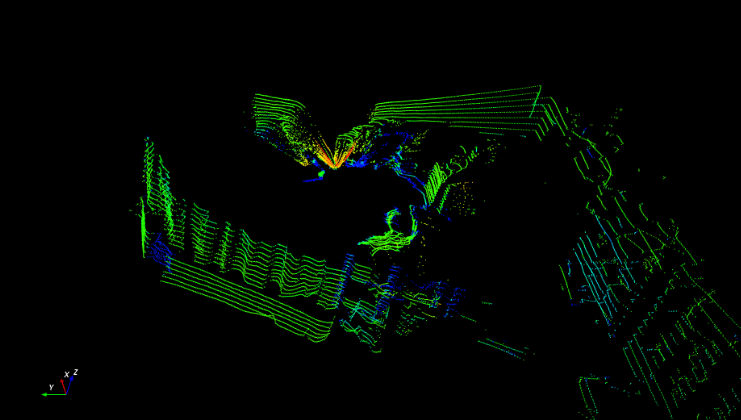 |
| 三维扫描点云图 |
♦ 技术指标
• 脉冲测距激光器:工作波长905nm,光斑直径4mm,指示激光器650nm,激光器可以配套驱动源输出10ns-50ns脉冲激光;
• 脉冲探测器组件:探测器范围600-1100nm,上升沿2ns,放大电路,探测方波脉冲小于5ns;
• 脉冲驱动源组件:方波脉冲调节档位10ns、20ns、30ns、40ns和50ns,方波重频调节档位5K、10K、15K、20K和25K,白色电源箱,预留调制输出参考信号接口;
• 漫反射白屏组件:表面喷塑哑光设计,210*100mm,最小刻度1mm;
• 激光雷达组件:工作波长905nm,激光等级1级(人眼安全),激光通道16路,探测距离100m@70%,测距精度±1cm,垂直视场角±16度,水平360度,水平分辨率0.09度@5hz;以太网通信;
• 竖直移动台:高度调节300mm,丝杠设计,移动过程自动锁紧,承重不小于5kg,预留转接板,可安装雷达及成像系统;
• 多孔固定板:底板450*300*12.7mm,表面25*25间距的M6螺纹孔;
• 图像传感器:黑白CMOS,工作波长450-950nm;靶面尺寸1/1.8″,分辨率1280*1024,灵敏度1.6v@550nm/Lux/s,像素5.2μm;软件包含测量和定标模块;
• 雷达测试板:不同反射率测试板,反射率2%-95%@905nm;
• 软件模块:软件包含雷达3D显示模块、数据采集模块,可以设置扫描角度和激光通道,预留一次回波和二次回波设置功能,数据存储等功能。
♦ 设备成套性
激光光源、探测器组件、激光雷达组件、测试板组件、升降组件和成像组件
♦ 必备设备
计算机
♦ 建议课时
4课时
联系我们了解更多产品信息~



